Our Soap Making Workshop on November 24th was a full house. We had eight participants who each made their own batch of soap and coloured and scented it to their liking.
Some of the participants were definitely more artistic than me.






Our Soap Making Workshop on November 24th was a full house. We had eight participants who each made their own batch of soap and coloured and scented it to their liking.
Some of the participants were definitely more artistic than me.

A few years ago I bought an original Bradley Smoker, thinking it would be a fun new way to prepare food. I quickly got frustrated with it. Continue reading Improving an original Bradley Smoker
Over the past few years one of our members, Peter or petros in IRC, has been making a small trailer to tow behind his car. I must say it is awesome. Here are some of the highlights of that build. Continue reading Teardrop Trailer Build
I decided that I needed to have some decent sheet lumber storage in my garage because i didn’t want anymore warped wood. So to build this storage I figured the easiest way was to build a jig to make long angle (or taper) cuts in a controlled precise manner.
Paintball Game for Ranger Lake Bible Camp
A few years ago I built a “Terrorist Bomb” for RLBC to use as a paintball game. It was simple. It was hacked together out of a variety of parts I had lying around. It was also a huge hit.

After that, we started talking about a grander scheme. The next game would consist of three bases with buttons and lights. Initially it was traffic lights, but it eventually became the light pole we ended up using. The biggest problem with this sort of “capture the flag” type game is having referees to keep score. If we could use technology to keep score, it frees up the refs so they can focus on fair gameplay. I had been using XBee devices in my “day job,” so decided they would work great for communication between the bases and the command centre. Continue reading Base Commanders (Paintball Game)
When switching back and forth between calibres on my Lee Pro 1000 reloading press, I often have bits and pieces strewn around my reloading bench. Now, I tolerate a fair bit of disorder, but sometimes it gets to be a bit much. So… today’s quick project was to help organize my mess a bit better.
The parts I switch out when changing between 9mm and .38spl are the turret with the dies installed, the shell plate, and the case slider. (Also the case feeder, but that’s too big to store this way.)
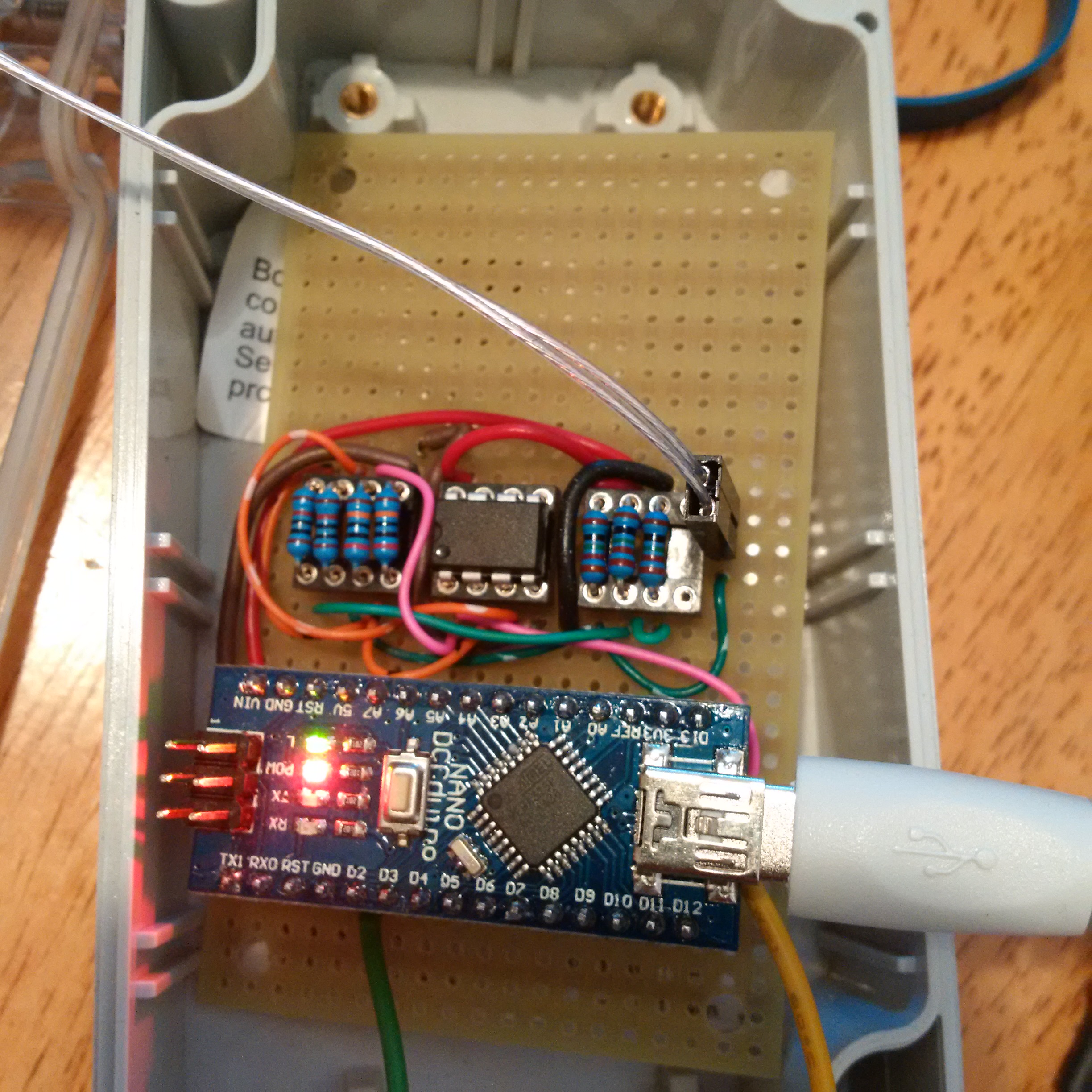
The sous vide controller is beginning to take better shape than the prototype on the breadboard. Note, this one still has a fully configurable analogue stage. The wheatstone bridge and the op-amp gain can be changed by swapping out resistors.
The meals have also progressed beyond soft-boiled eggs.

I have been talking about this for ages… threatening to build it… even ordered parts. But, it wasn’t until a couple of weeks ago when Drew brought his Sansaire over and cooked some eggs for us that I finally got the motivation to start work on this project.
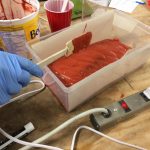
There are 101 ways you could do this. I’m going for cheap. My temperature sensor is a super-cheap PT100 PTC sensor. I am running it in a wheatstone bridge connected to a differential amplifier tuned to get the best resolution out of the temperature range I’m interested in. (49C – 74C) The output of that goes to a Nano clone, which currently only turns a Solid State Relay on and off. (I plan to use PID in the future) The relay turns a slow cooker on and off. This tiny one really isn’t hot enough, but I’m giving it a try today.
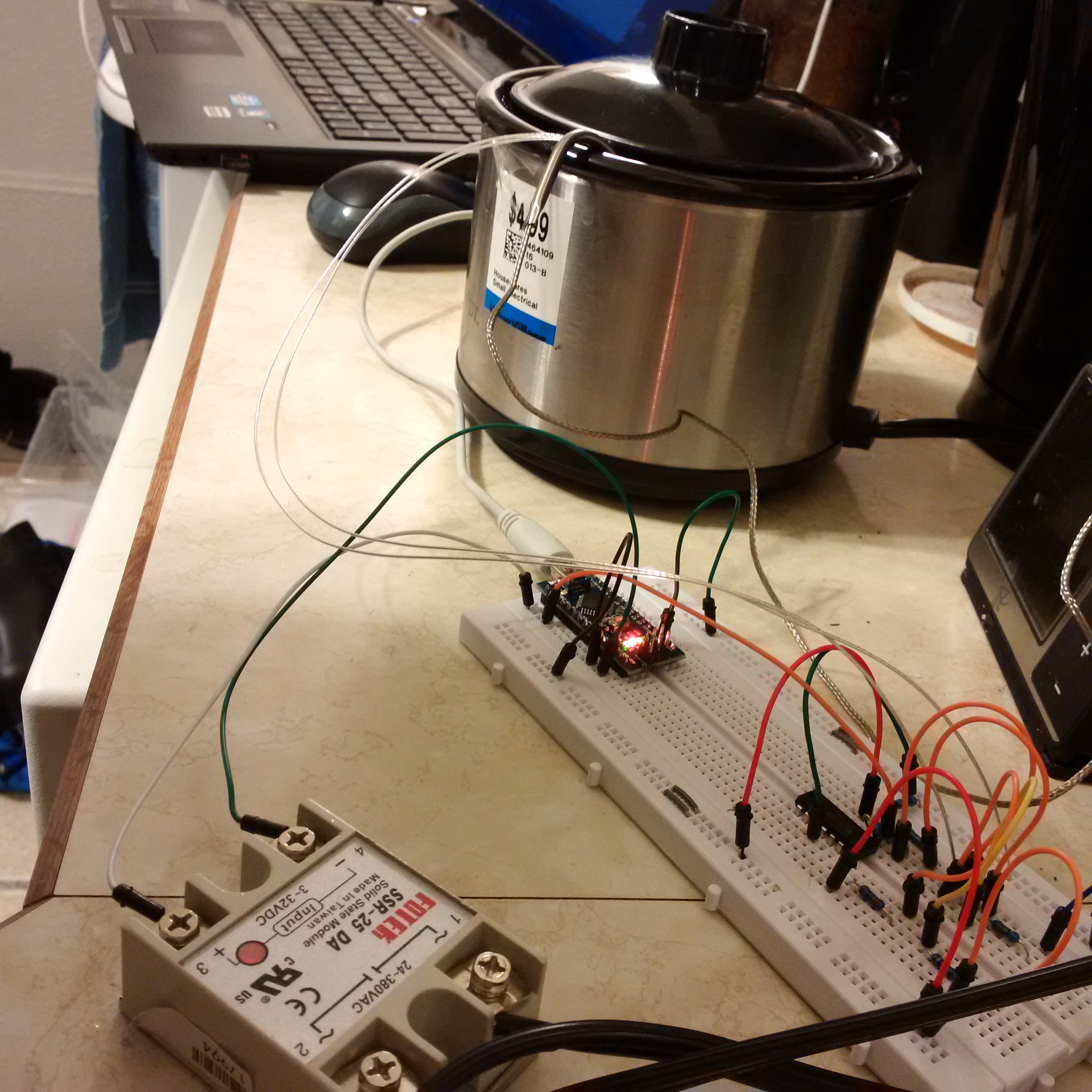
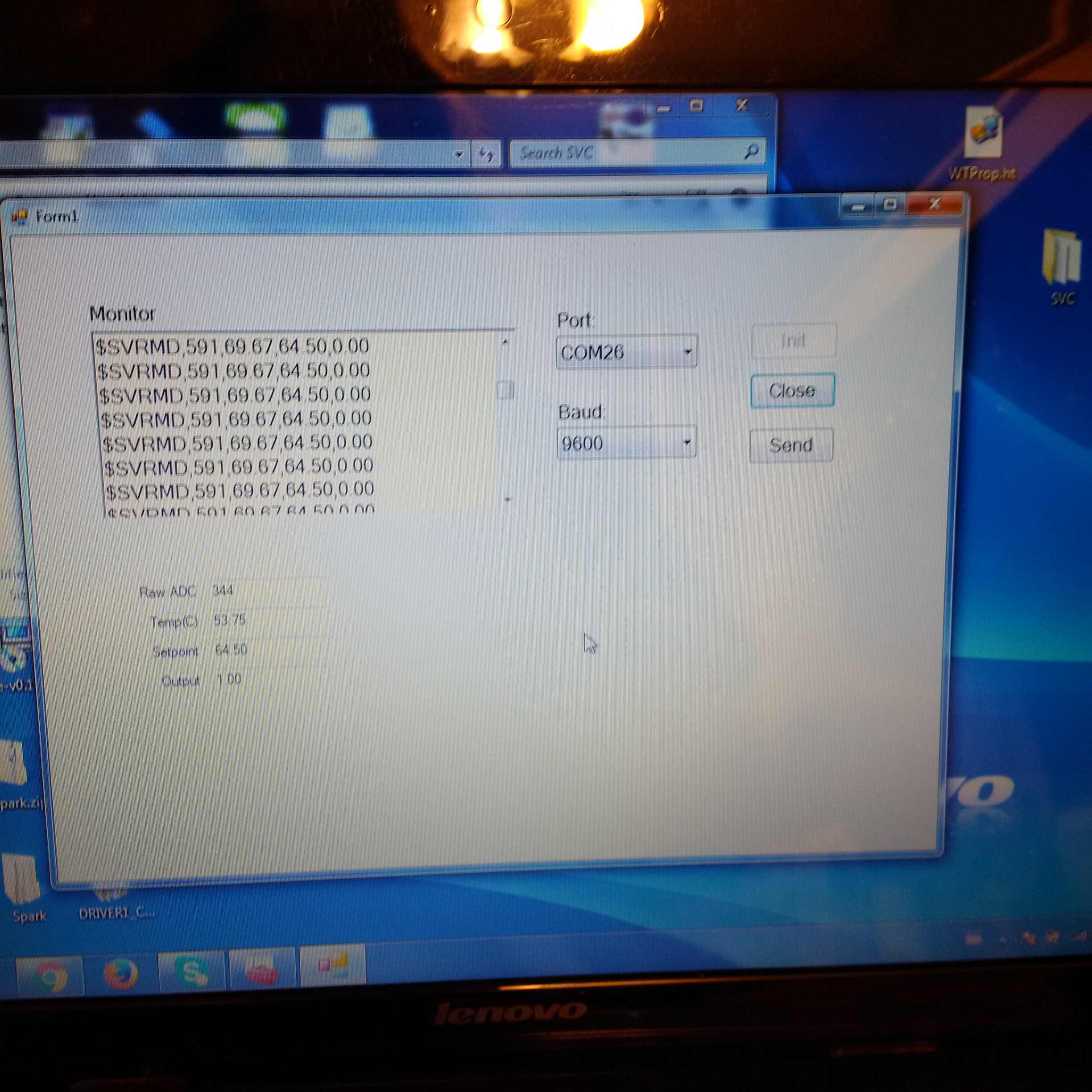
I am monitoring the whole thing over the USB/Serial port with a quickly hacked together windows application. Future plans including adjusting the setpoint and tuning the PID from this application.
So, in about an hour, I should have some perfectly cooked eggs!

UPDATE:
It worked! These were cooked to 64.5C for one hour.


Although the boards didn’t arrive in time for the September event, they are now here. I populated and tested one. I think these will look great for our January event.

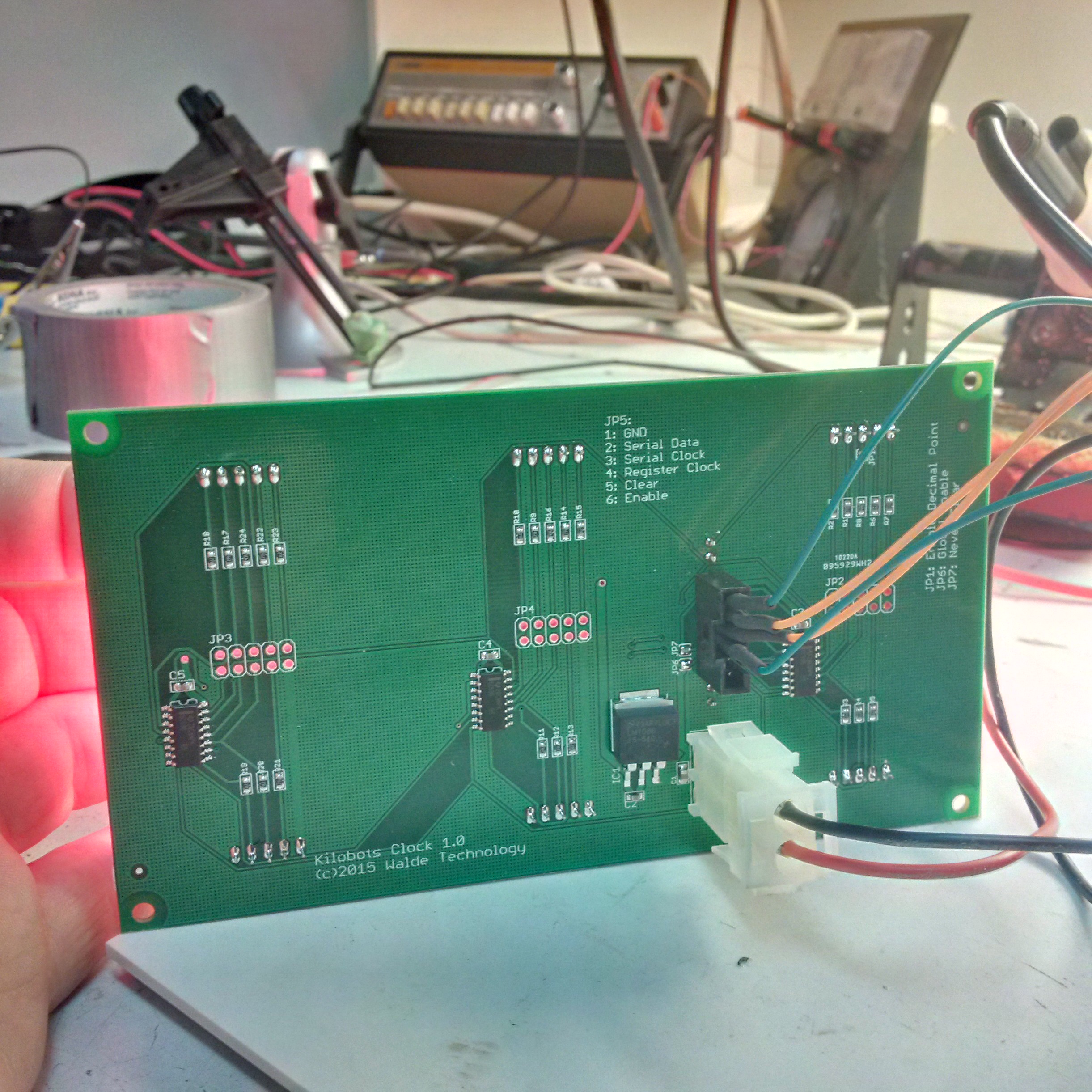
I wanted to wait until I was finished before making this post. Sadly, there has been an unexplained delay with shipping my circuit boards. So, since my job is keeping this webpage moving with new projects, here it is.
So far…
I ordered some 2.3″ 7-Segment LEDs from Aliexpress for the purpose of making a countdown timer for the SCRC Kilobots arena. The plan was to have it ready for the big Kilobots XXXI event Sept 20th and 21st, 2015.

Since time was getting tight, I went ahead and designed a circuit board and sent it away for manufacturing. (Sent the files, that is.)

I did this in the wrong order, really, since I hadn’t even tested the circuit yet. Over the Sept long weekend, I spent a bit of time and built the circuit on a breadboard to test. Fortunately, it worked.
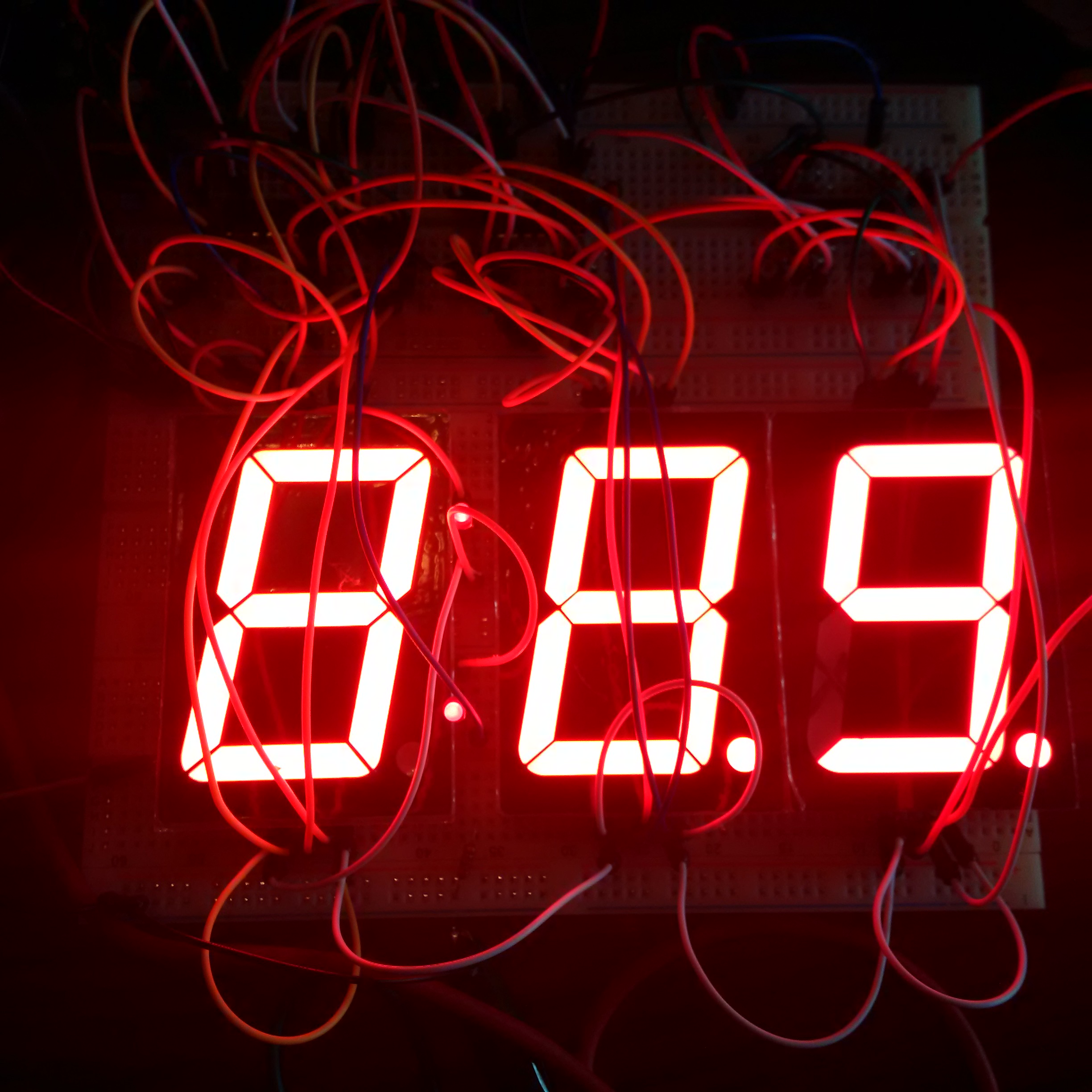
(Yes, one of the segments is out in that picture.)
Here it is in operation. (Sped WAY up so you don’t have to watch for a full three minutes.)
