We are offering another soap making workshop on December 3, 2015. Click http://sktechworks.ca/events/soap-making/ for more information.
Countdown Timer Update
Although the boards didn’t arrive in time for the September event, they are now here. I populated and tested one. I think these will look great for our January event.

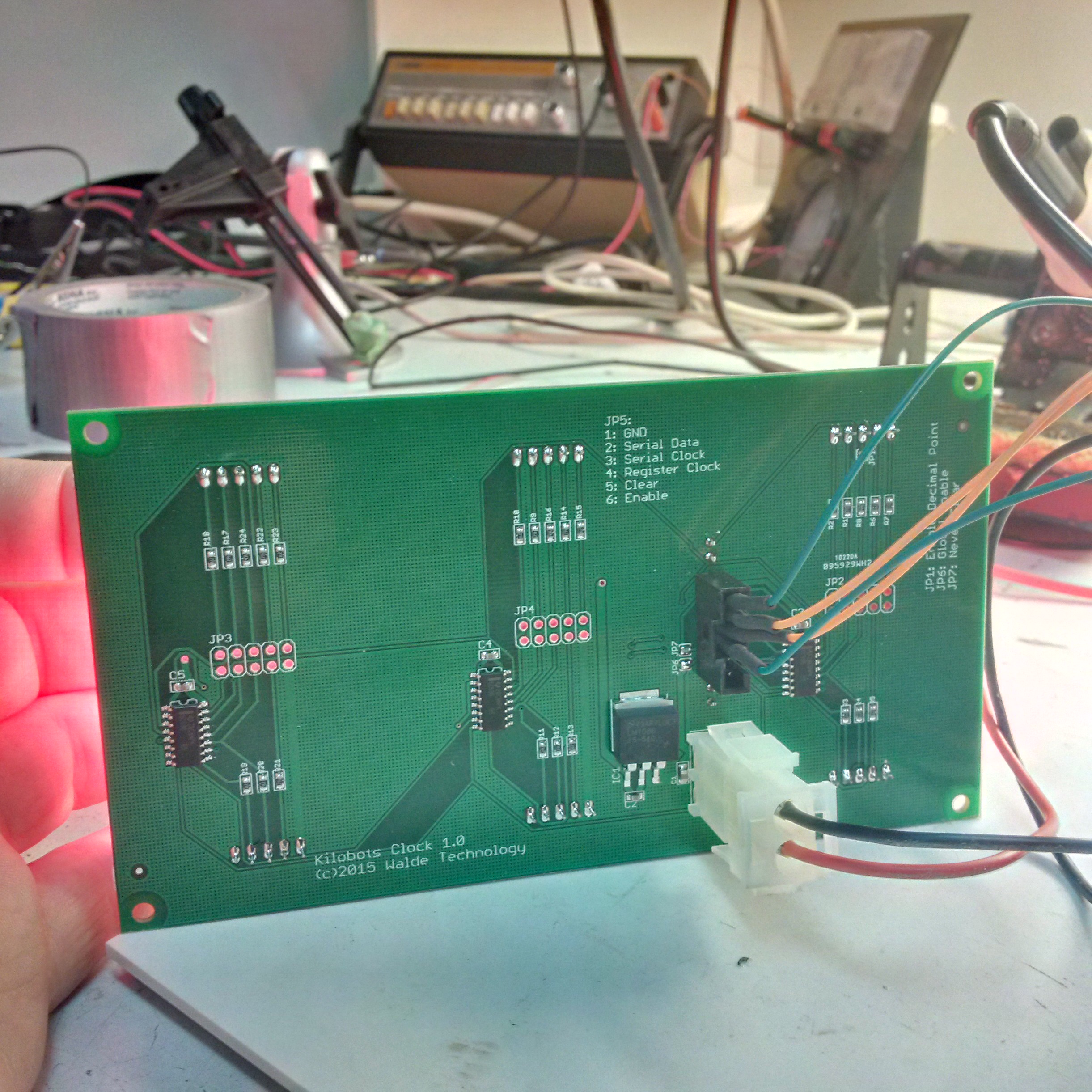
Countdown Timer for SCRC Kilobots
I wanted to wait until I was finished before making this post. Sadly, there has been an unexplained delay with shipping my circuit boards. So, since my job is keeping this webpage moving with new projects, here it is.
So far…
I ordered some 2.3″ 7-Segment LEDs from Aliexpress for the purpose of making a countdown timer for the SCRC Kilobots arena. The plan was to have it ready for the big Kilobots XXXI event Sept 20th and 21st, 2015.

Since time was getting tight, I went ahead and designed a circuit board and sent it away for manufacturing. (Sent the files, that is.)

I did this in the wrong order, really, since I hadn’t even tested the circuit yet. Over the Sept long weekend, I spent a bit of time and built the circuit on a breadboard to test. Fortunately, it worked.
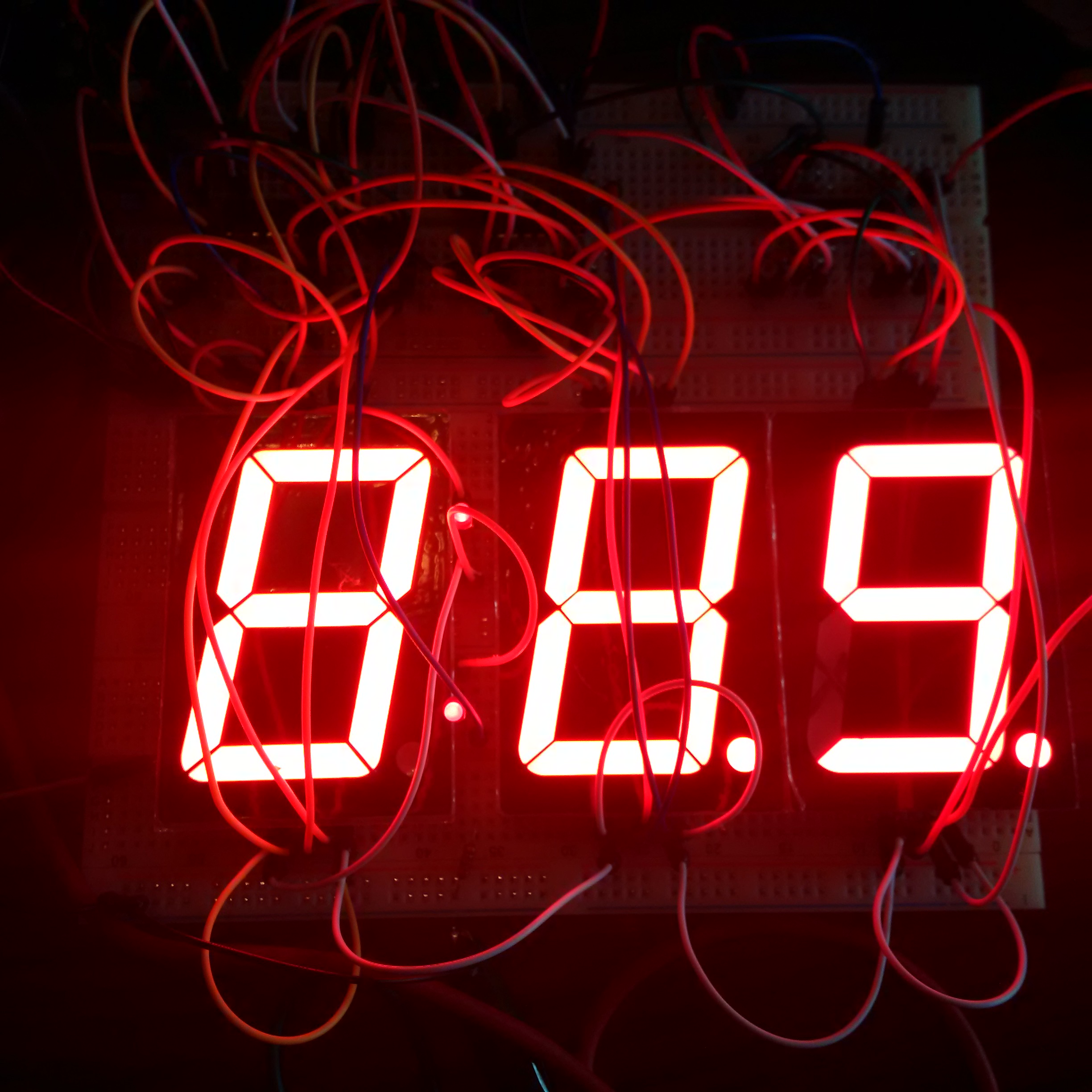
(Yes, one of the segments is out in that picture.)
Here it is in operation. (Sped WAY up so you don’t have to watch for a full three minutes.)
SKTW will be in Calgary for the Maker Faire

Al, Leah, and John will be bringing a bit of Saskatoon Techworks to Calgary on September 12th and 13th for the Calgary Mini Maker Faire. Come visit our booth and see a few of our projects.
Robots!
Some of our members have been hard at work building combat robots for the upcoming Kilobots XXXI which will take place at the Saskatoon Comic & Entertainment Expo on September 19th and 20th, 2015.
Rachel is rebuilding a bot formerly known as Roadrunner:

“it’s running and it is calibrated now to weld the body and put it on almost done so excited!”
Al has done some upgrades to the drive system of Kitty Shark. He might have overdone it:
Jeremy has done a very nice job on Psychomauler. He has used the CNC router, the CNC mill, and the laser cutter during the design and build of this one:

“Psychomauler mostly put together. Had to give up on the carbon fibre after the CNC screwed up and cut it the wrong size (missed steps, or something like that), so garolite will have to do. I should still be OK for weight, I’m at about 350g currently and just need to add my titanium wedge.”
T-Shirt Workshop
Albert held a T-Shirt Making workshop and, this time, used his vinyl cutter to cut heat-transfer material. (We have used laser-cut stencils in past workshops.) The workshop was primarily attended by SCRC members making team t-shirts for the upcoming Kilobots XXXI in September.
Kurtis writes:
“Workshop went great! If anyone wants to post pics of their team shirts, please do! (We’re always looking for more website content.)
Thanks to Albert for putting it on!”

Soap Workshop
We held a soap-making workshop on July 23rd.
Tony writes:
“If anyone’s curious, that’s about how much soap you get from ~a yogourt container of cheap canola oil + a bit of coconut oil. It still needs to finish curing for a few weeks. Despite the remaining lye content, I washed my hands with it this morning and it is quite lovely.
Awesome workshop last night! — with Minna Liang and Scott Walde.”

Minna’s soap:

And mine:

.
Annual General Meeting
Hello everyone,
You are cordially invited to our Annual General Meeting, to be held at Saskatoon TechWorks on March 17, 2015 at 7:00PM. The agenda for this meeting will include:
- A presentation of the Chairman’s Report from our President, Albert La
- A review of this past year’s financial statements from our Treasurer, Jeremy Rans
- Election of the board members for next year
Board nominations are now open and can be made on this forum post. Nominations will close at the end of March 9, 2015.
This is also a time when we may make changes to the bylaws. If you would like to propose any changes to be vote on at the AGM, please email them to Saskatoon TechWorks no later than March 9, 2015.
Voting is available to members only, but the public is welcome to attend.
I look forward to seeing you all there,
James Cooper
Secretary
Saskatoon TechWorks
Project Report: Hanging Pen Plotter
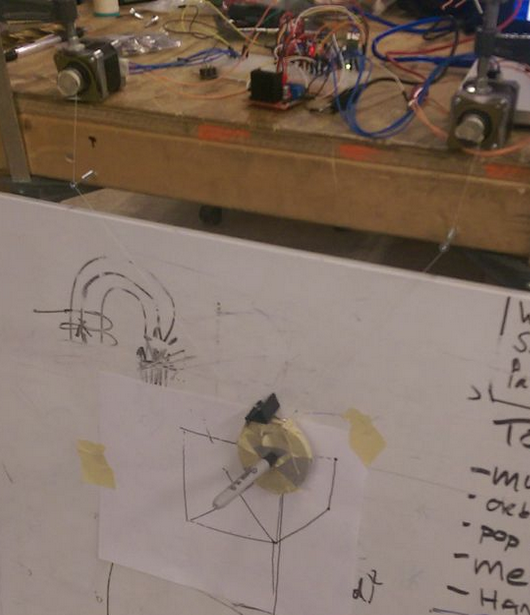
One of our members, Jeremy Rans, is currently working on a hanging pen plotter, i.e. a machine that draws on a vertical surface with a suspended pen. The inspiration for the project came from this article on Hackaday. The parts being used include two NEMA-17 stepper motors for controlling the X-Y position of the pen, two EasyDriver stepper drivers, a servo for lifting the pen on and off the drawing surface, and an Arduino Uno for controlling the motors.
The main goal of the project is to make a plotter that can be easily attached to a wall-mounted whiteboard of any size. Most vertical plotters rely on the drawing surface being slightly inclined so that gravity applies the force necessary for the pen to write. Since that’s not really an option with wall-mounted whiteboards, magnets will be used to hold the pen against the board. The plotter will draw using G-Code instructions, a common choice for this type of device.
So far, most of the work done that has been done has been on the software. That includes the Arduino sketch for driving the motors, for which the AccelStepper library has been very helpful. AccelStepper allows for the stepper motors to be driven concurrently which cuts down on a lot of the math that would be involved in having to drive the motors one at a time. The other part of the software is a simple python program for reading in G-Code instructions and telling the Arduino how many steps each motor will need to take to satisfy each instruction. The software was recently tested with a quickly hacked together plotter which can be seen in action in the video below.
With most of the programming work out of the way, the current focus is on the design of the pen holder, the motor mounts & the line guides. The line guides are basically magnetic hooks that the suspension line will run through at the upper left and right corners of the desired drawing area. This allows for the motors & other electronics to remain close together.
Stay tuned for a future update in which we’ll feature the finished product!
Workshop announcement: Robot Kit Arduino Programming 1
Hi everybody,
For those of you who have built a robot kit with me at Saskatoon Techworks, I will be holding the first programming workshop on December 13th, 12-3PM. If you are available and plan to attend, please email me at james.cooper@sktechworks.ca. Please bring your robot, and if possible, a laptop.
For more information, check the event page.